Elektrik Motorları
Elektrik motorları, elektriğin iletkenler üzerindeki manyetik alan etkisiyle üretilen itme kuvvetine dayanarak elektrik enerjisini hareket enerjisine dönüştüren elektrik makineleridir.Elektrik motorları temel olarak alternatif akım motorları ve doğru akım motorları olmak üzere ikiye ayrılırlar.

Alternatif Akım Motorları
Alternatif akım motorları asenkron ve senkron motorları olarak ikiye ayrılır.
Asenkron motorlar : Endüstride en çok kullanılan motor türleridir. Bakımları az ve ucuzdur. Çalışmaları esnasında ark oluşturmazlar.
Asenkron motorlar stator manyetik alan devri ile rotor devrinin farklı olmasından dolayı bu adı alırlar.
Asenkron motor çeşitleri
Faz sayılarına göre
1 – 1 fazlı asenkron motorlar
2 – 3 fazlı asenkron motorlar
Yapılarına göre
1 – Sincap kafesli motorlar
2 – Sargı rotorlu motorlar
Sincap kafesli motorların rotoru aluminyum plakalardan oluşmaktadır. Bu plakalar döküm yöntemiyle elde edilir. Manyetik akı bu plakalar üzerinden gezerek hareket sağlanır.
Sargı rotorlu motorlarda ise rotoru bakır tel ile sarılmaktadır.
Senkron motorlar : Senkron motorlar stator manyetik alan devri ile rotorun devri aynı olan motorlara denir. Sabit hız gerektiren endüstriyel uygulamalarda , bazı robot türleri gibi yerlerde kullanılır.
Senkron motorların devir sayısı şöyle hesaplanır.
Doğru Akım Motorları
Doğru akım motorları genelde düşük güçte ve küçük boyutlarda yapılır. Genelde elektronik aletlerin içerisinde kullanılırlar.
Doğru akım motorlarında duran parçaya yani gövdeye endüktör, dönen kısma ise endüvi adı verilir.Yapısal olarak sabit mıknatıslı yada sargılı gövdelerde tasarlanabilmektedir.Endüvi için de aynı durum söz konusudur.
Piyasada bulunabilen DC motor çeşitleri şöyledir ;
1 – Sabit mıknatıslı DC motor
2 – Fırçasız DC motor
3 – Servo motor
4 – Step motor
1 – Sabit mıknatıslı DC motor
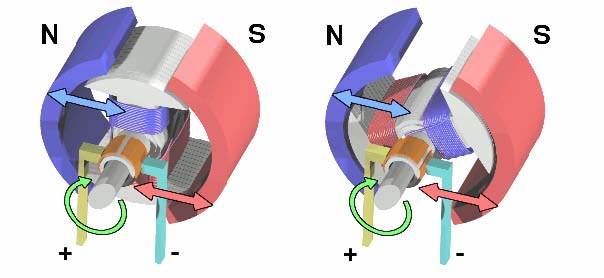
Sabit mıknatıslı motorların gövdesinde doğal mıknatıslar bulunur. Bu mıknatıslar küçük motorlarda genelde N-S olarak birer tane bulunur. Motorun dönen kısmı endüvi ise bakır tel ile sarılıdır. Bu bakır sargılar kollektör dilimlerine basan fırçalar aracılığıyla dışarıya aktarılır.
Motora verilen gerilim fırçalara, oradan kollektörlere ve oradan endüvi sargılarına ulaşır. Bu sargılar akım sayesinde manyetik alan oluşturup elektriksel olarak N ve S kutupları oluştururlar. Motorun gövdesinde bulunan doğal mıknatısların yerleşim şekli sayesinde endüviyi iterek veya çekerek dönmesini sağlarlar. Endüvi döndükçe kollektör dilimlerine basan fırçalar bir sonraki dilime basar ve bir sonraki sargılarda manyetik alan oluşturur. Bu döngü böyle akım kesilene kadar devam eder.
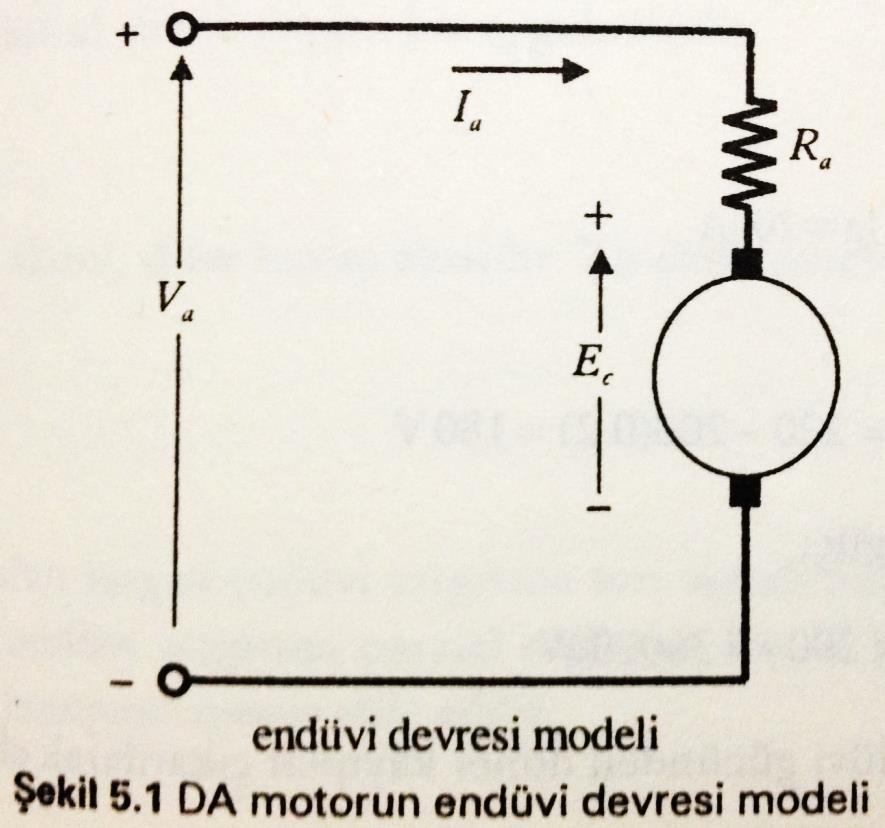
Motorun endüvi devresi yukarıdaki şekildeki gibidir. Va motora uygulanan gerilimdir. Ra ise motorun iç direncinden oluşan dirençtir. Ec endüvi ucunda oluşan gerilimdir.
Endüvi voltajımız motorumuzun sabit mıknatısının manyetik akısı ( Φ ) ile motorun açısal hızı ( Wm ) ile ve motorların K1 denilen sabiti ile orantılıdır. Bir motor için K1 ve Φ değerleri sabit olarak kabul ederiz ve bu sebeple Ec voltajı açısal hıza bağlı çıkar.Ia endüvi akımıdır.
Formüller ;
Ec = K1 * Φ * Wm
Va = Ec + Ia * Ra
2 – Fırçasız DC Motor
Fırçasız DC motorların yapısı normal DC motorlarla neredeyse aynıdır. Fırçasız DC motorlarda doğal mıknatıslı olan parça döner.
Bu motorların 2 tipi vardır. Bunlardan birisi endüktörü dönen tiptir. Bu motor yapı olarak normal sabit mıknatıslı DC motor ile birebir aynıdır. Fakat bunda kollektör dilimleri ve fırçalar yoktur. Motorun ortasında bulunan endüvideki sargılara sıra ile akım vererek endüktörün dönmesini sağlıyoruz. Bu tip motorlara en güzel örnek bilgisayarımızın soğutucu fan motorlarıdır.

Bir diğer tip ise endüktörü sargılı, endüvisi doğal mıknatıslı olan tiptir. Bunun çalışma mantığı da aynıdır.

3 – Servo Motorlar

Servo motorlar konum motorları olarakta adlandırlır.Verilen sinyalin genlik süresine göre belirli açılarda konumlanırlar.
Yapısal olarak gövdelerinde sabit mıknatıslı dc motor, mikrodenetleyici devre ve dişli takımı bulunmaktadır.
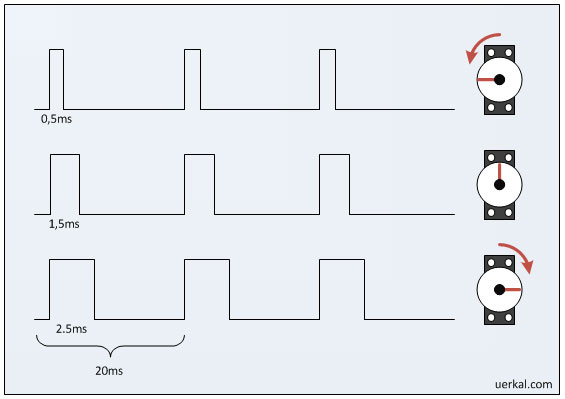
Piyasada bulunan servo motorlar genelde 0-180 derece aralıkta hareket etmektedir.
Bu motorlar PWM sinyali adı verilen bir sinyal ile kontrol edilmektedir. PWM siyanllerinin bir periyodu genellikle 20ms uzunluğundandır.Açısal olarak Motorumuzun açısını belirlemek için sinyalimizin (+) peryodunun süresi 0.5ms ile 2.5ms arasında değiştirilmelidir. (Bu değerler motorun türüne,markasına vb kriterlere göre değişiklik gösterebilir.)
4 – Step Motorlar
Step motorlar gövdesine belirli açılarla yerleştirilmiş sargılardan oluşur. Endüvisi ise bir adet dişliden oluşmaktadır. Step motorlar ayn zamanda senkron fırçasız dc motorların sınıfınada girer.
Çalışması fırçasız dc motorlar gibidir. Sargılarına sıra ile akım vererek belirli açılarda dönmesi sağlanır. Sargılara verilen sinyalin sıra yönünü değiştirerek motorun dönme yönünü değiştirebiliriz.

3 tipte step motor bulunmaktadır. Bunlar ;
- Sabit mıknatıslı step motor
- Hibrid senkron step motor
- Değişken relüktanslı step motor
Step motorlar sarım şekli açısından 2 farklı şekilde üretilirler.
Bipolar step motor : Bu tip motorların genelde 4 ucu bulunur. Bipolar step motorlar çift yönlü besleme özelliğine sahiptirler. Motoru ters yönde döndürmek için bobinlere uygulanan akım yönünü terse çevirmek gerekir.
Unipolar step motorlar : Unipolar step motorlarda 5 veya 6 uç bulunur.Bu 5. Veya 6. Uç ortak uçtur. Bu uçlar (+) besleme ucuna bağlanırlar.
 Step Motrorları Sürmek
Step Motrorları Sürmek
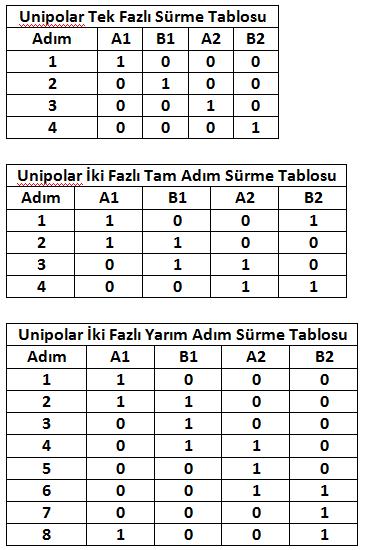
Step motorlar iki farklı şekilde sürülebilir.
- Tam adım sürme
- Yarım adım sürme
Tam adım sürme 2 fazlı besleme şeklidir. Motorun 2 ucuna yandaki tablodaki sıra ile sinyaller uygulanarak döndürülür. Bu döndürme işleminde motorun dönme açıları daha büyüktür fakat torku daha yüksektir.
Yarım adım sürmede ise motorun aynı anda 1 ucuna sıra ile enerji verilerek sürülür.Bu besleme şeklinde tam adıma göre yarısı kadar döner. Daha hassas bir dönüş açısı sağlanır. Fakat torku düşüktür.
Tam adım besleme şeklinde mesela 10 tetiklemede x derece dönüyorsa yarım adımda 10 tetiklemede x/2 derece dönüş sağlar.